Robotics


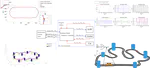
This project was a course work of this course. Project consists of setting up Pub-Sub mechanism for communicating between two ROS nodes, modifying URDF model of factory, ROS Navigation stack for navigating turtle bot in factory environment, manipulation of robotic arm by ROS MoveIt package and behaviour setup with FlexBE App state machine.